BLOG
ベラちゃん日記
2025.03.18
お知らせ
BellaBotの仕組みをご紹介!
BellaBotの基本構造
BellaBotは、主に以下のような要素で構成されています。
- フレームと収納スペース:ロボットの本体は軽量かつ耐久性のある素材で作られており、4段のトレーが備えられています。なので、一度に複数の料理や飲み物を運ぶことができます。
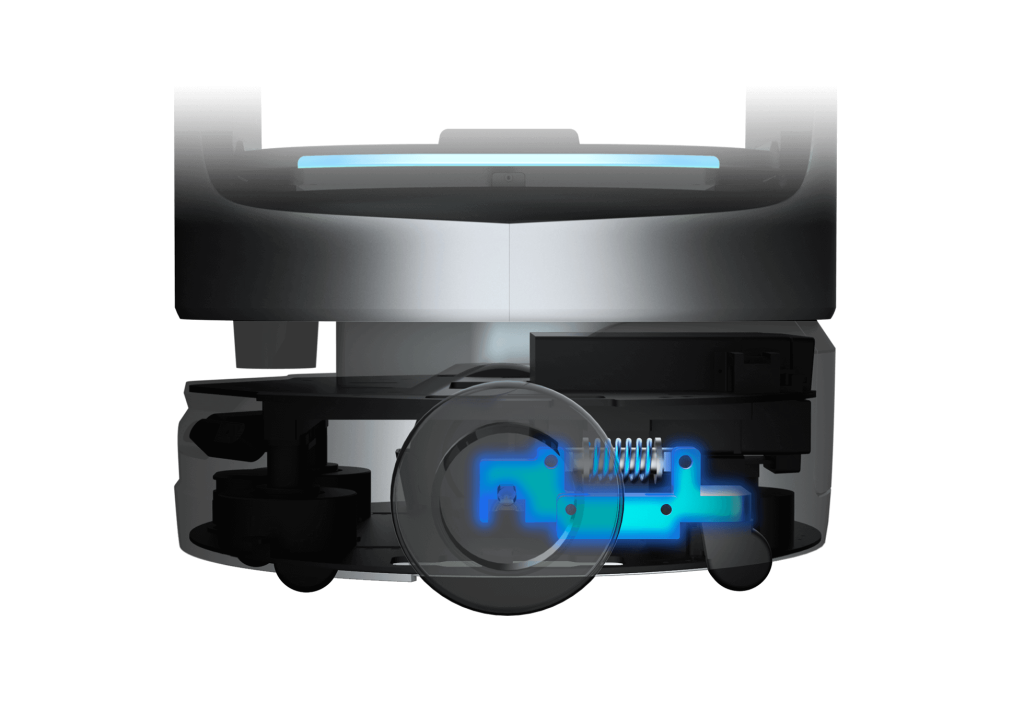
- 駆動装置:モーターとタイヤを備えており、ロボットは前後左右にスムーズに移動できます。また、サスペンションを備えているので、ロボットは段差があっても滑らかに走行し、障害物を避けながら目的地に到達できます。
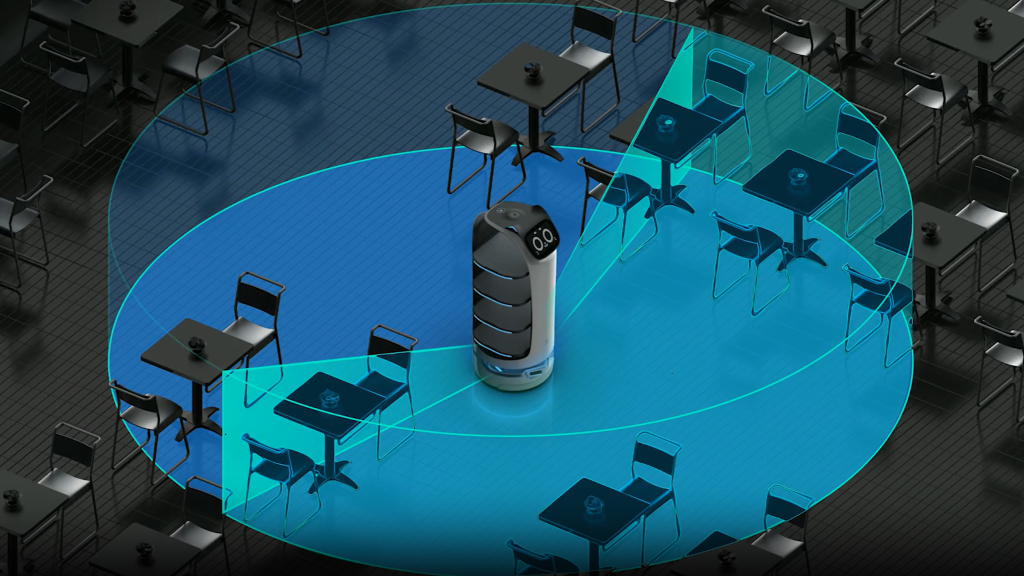
- センサー:BellaBotは、RGBDカメラやLiDARなどの様々なセンサーを搭載しており、それらを使用して環境を認識し自律的に動作します。

センサー技術による障害物検知
BellaBotが安全に動作するためには、障害物や人との衝突を避ける必要があります。そのために、先ほど紹介した以下のセンサー技術が用いられています。
- LiDAR(ライダー)センサー:LiDARは、レーザー光を使って周囲の環境を3Dでマッピングし、障害物との距離を測定します。この技術は、高精度な地図情報を生成し、ロボットが効率的にルートを選択できるようにします。
- カメラセンサー:BellaBotにはLGBDカメラが搭載されており、画像処理技術を使って周囲の人間や物体をリアルタイムで認識します。この技術により、より精密な移動や物体の認識が可能となります。

「BellaBot」の活躍を動画でご覧ください
お問い合わせはお気軽に担当の吉田までどうぞ!
katsuhiko_yoshida@sanki1948.co.jp