
カチャカのソフトウェアアップデート情報解説(Ver 3.10.6)

2025年3月25日にカチャカのソフトウェアアップデートが実施されました。このアップデートで5つの機能追加と複数の機能改善が行われたので、何が変わったのかを詳しく解説します!
目次
カチャカの機能追加
坂エリアを指定(カチャカプロのみ)
坂道を「坂エリア」として指定できるようになりました。指定されたエリアでは以下のような制御になります。
- タイヤにブレーキ(ロック)がかかり、カチャカが坂道を安全かつスムーズに走行できる
- レーザーセンサーの距離の調整を自動で行う
坂エリアの設定手順
坂マップの作成
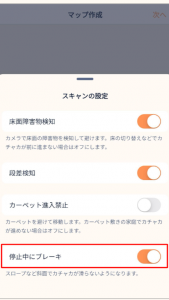
マップ作成時は、「停止中にブレーキ」機能を有効化し、坂エリアを走行してマッピングしてください。
坂エリアの指定

マップタブを開き、画面右上の「+」アイコンをタップ。メニューから「坂エリア指定」をタップし右下の「+」アイコンをタップします。
坂エリアの決定

灰色の枠を「坂の傾斜部分」と「坂の入り口や出口の平坦なエリア(1.5m程)」が入るよう長めに囲い「OK」をタップします。
WPA/WPA2エンタープライズのWi-Fiに対応(カチャカプロのみ)
IDとパスワードによる個別認証が行われる「WPA/WPA2エンタープライズ」のWi-Fiに接続することが可能になりました。
WPA/WPA2エンタープライズの設定手順
- カチャカにアクセス可能なWi-Fiネットワークを準備し、カチャカに接続(「WPA/WPA2エンタープライズ」はQRコードを利用したWi-Fi設定に未対応)
- カチャカアプリから「設定タブ」を開く
- “カチャカ設定”から対象の「カチャカ」をタップ
- 画面下部の「Wi-Fi再設定」をタップ
- 画面右上の「スキップ」をタップ
- 画面中部の「その他…」をタップ
- 「セキュリティ」をタップし、「WPA/WPA2エンタープライズ」を選択
- 画面右上の「設定」をタップします
- 下記の必要事項を入力し、画面右上の「設定」をタップします
- カチャカが「WiFiの設定ができました。再起動します。」と設定が完了したことを知らせる発話があることを確認
LEDリングをパトランプのように点灯(カチャカプロのみ)
走行中のカチャカをより視認しやすくするため、カチャカのLEDリングが緑色に点滅(すばやく回転)するように設定できます。設定されていないときは白色点灯で走行します。
パトランプの設定手順
- カチャカアプリから「設定タブ」を開く
- “カチャカ設定”から対象の「カチャカ」をタップ
- 「詳細設定」をタップ
- 「パトランプ表示」のトグルをタップして設定を変更
- ON:走行中に緑色に点滅(すばやく回転)
- OFF:走行中に白色に点灯する
パトランプ表示の詳細
| 動作 | LED表示 |
| 走行時 | 緑色回転(素早く回転) |
| 停止時、充電時 | 緑点滅 |
| バッテリー残量低下 | 黄色点滅 |
ローカルWi-Fiの環境でカチャカアプリからカチャカを操作する(カチャカプロのみ)
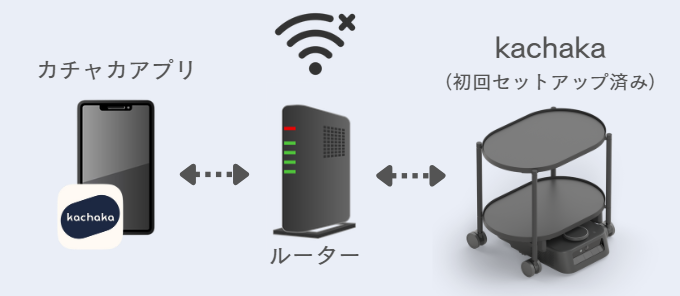
初回セットアップが完了したカチャカであれば、外部のインターネットにアクセスできないネットワーク環境(オフラインのローカルWi-Fi)であっても、ルーターを経由してスマートフォンアプリからカチャカを操作することが可能です。
ローカルWi-Fiの設定手順
- オフライン(インタネット上流のない)のWi-Fiに、Wi-Fiの再設定から設定を行う
- カチャカ再起動の合図である「Wi-Fiの設定ができました。再起動します。」と発話するかを確認
- カチャカアプリから「設定タブ」を開く
- 設定するカチャカを選択
- 「接続モード」をタップ
- 接続モードの「ローカル接続(LAN接続のみ)」をタップ
ローカルWi-Fi設定の注意事項
- 初回セットアップの際は、外部にアクセス可能なインターネット環境が必要(初回はインターネットを経由して”証明書の登録”や、”ライセンス情報の取得”を行うため)
- オフライン環境でのご利用の場合は、一部の機能に未対応(スケジュール機能、ソフトウェアアップデート、リモートサポートのアクセス許可、カチャカにお願い)
- プライバシーセパレータなどの機能が有効であるネットワーク環境では利用不可
改善された機能
- 壁のマーカーを用いた停止機能で、目的地の家具の向きに合わせて停止が可能
- 壁のマーカーに合わせて停止した後、再出発時に壁にぶつかる問題の修正
- 共有経路を複数設定した場合、複数の共有経路を考慮した経路計画を行う
- 「カチャカにお願い」機能で、すべての目的地を巡回するタスク実行時に、自己位置補正用のマーカーへ移動してしまう問題の修正
- 「カチャカにお願い」機能で、複数のスケジュールやショートカットを作成
- マーカーによる自己位置補正機能の精度の向上
- 距離の長い地点間ルート走行時に、途中で到着を諦めてしまうことがある問題の修正
- 走行速度指定エリアに入ったあと、しばらくするまでエリアに設定された速度が適用されない問題の修正
- 壁のマーカーに合わせて停止した後、発進する時の速度が緩やかになる
- kachaka apiのDockAnyShelfWithRegistrationCommandが履歴に表示
当社では、実際にロボットを持ち込んだ無償のデモンストレーションやレンタルを行っています。導入を検討中の方で、ロボットの動きを見てみたい方はぜひ当社にご相談下さい。
カチャカプロ(kachaka Pro)紹介動画

OTHER COLUMN
その他の技術情報・コラム

カチャカAPIとは?概要や出来ることを詳しく解説します!
最近よく耳にする「API」という言葉。プログラム同士をつなげる便利な仕組みですが、具体的にどう役立つのかピンとこない方も多いでしょう。今回は、自律走行ロボット「カチャカ」をより便利に使える 「カチャカAPI」 について、 […]
配膳ロボットをFAで使う場合の注意点② ~準備編~
目次1 配膳ロボット活用の最前線2 1. 搬送物の選定2.1 BellaBotの搬送スペック2.2 PuduBot2の搬送スペック3 2. 目的地や経路の選定4 3. 走行テストの実施5 4. 配膳ロボットのお貸出し5. […]
外観検査装置導入で不良品をゼロへ!効率化のカギとは?
目次1 1. 外観検査装置とは2 2. 外観検査装置の種類と特徴3 3. 外観検査装置導入のメリット4 4. 導入時に注意すべきポイント5 5.AI技術を用いた外観検査装置なら三機にお任せ! 1. 外観検査装置とは 外観 […]