
配膳ロボットをFAで使う場合の注意点① ~環境編~
1. 配膳ロボットの使用場所
配膳ロボットの製造現場への導入には、まず環境が適しているかの確認が必要です。当社取り扱いの配膳ロボットは、屋内使用に限定され、飲食店やホテルなどでの使用を想定しています。
- 屋内使用の限定: 屋外使用はできず、屋内のみで使用可能です。
- 液体の影響: 水などの液体がボディにかかると、隙間から侵入し損傷の原因となります。
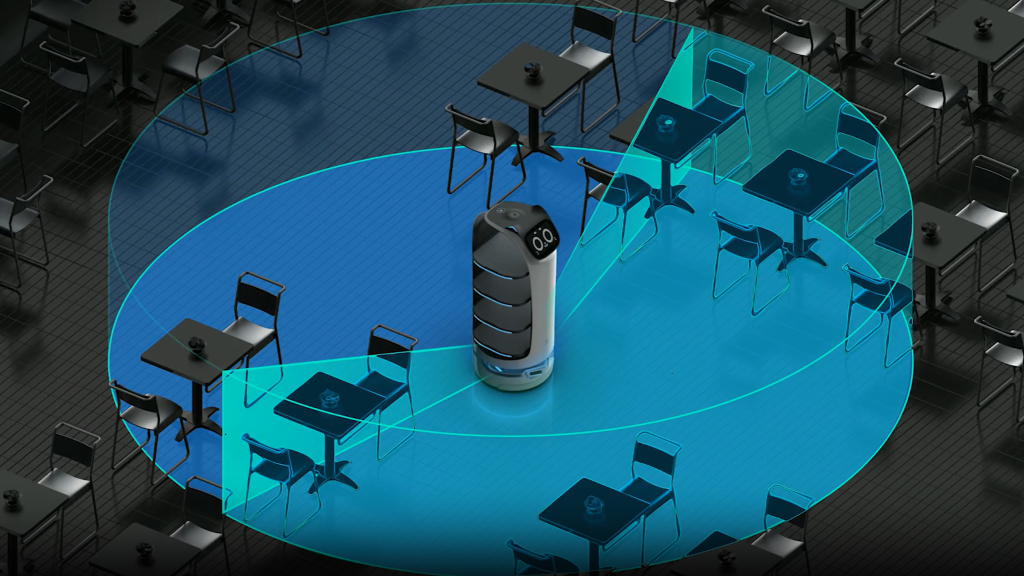
- 光の影響: ロボットはレーザーやRGBDカメラを使って位置補正を行います。直射日光が当たる場所では自己位置を見失う可能性があるため、事前に走行テストを行うことが必要です。
- ガラス張りの場所: 一面ガラス張りで障害物がない場所ではレーザーが反射せず、自己位置を見失います。床面から20cm~30cmの高さにテープを貼ることで、レーザーが反射し走行可能になります。

2. 床面の状態
配膳ロボットは駆動輪の回転数を計測し、移動距離や自己推定位置を算出します。そのため、床面の状態は非常に重要です。
- 乾燥した床: なるべく床は乾燥していることが望ましいです。
- 滑りやすい物質の除去: 床に切削油などの滑りやすいものがあると、駆動輪が空転し自己推定位置が分からなくなります。また、ロボットが停止しようとしたときに滑ると事故の原因になります。
3. 段差や傾斜
配膳ロボットの段差や傾斜の影響については、以下の点に注意が必要です。
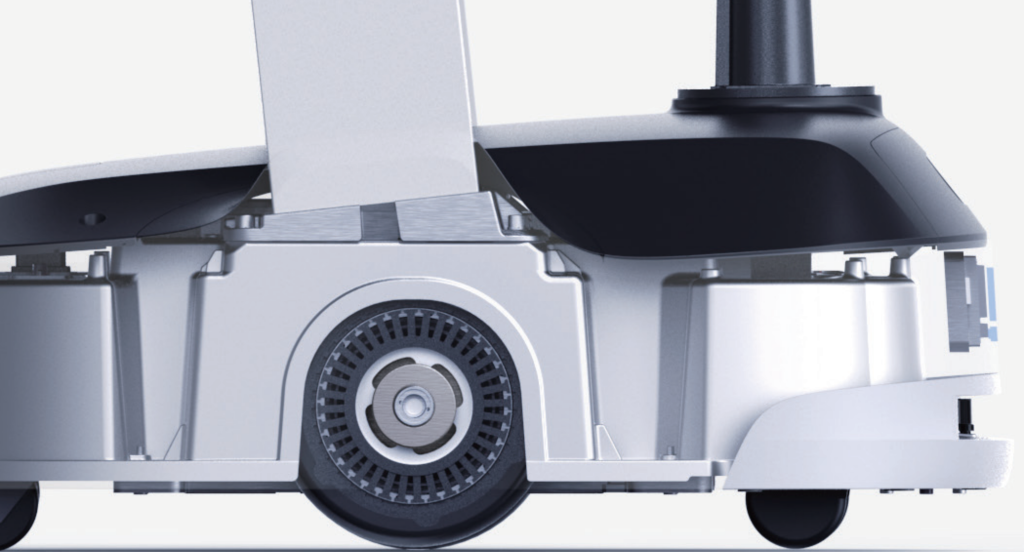
- 段差: ロボットのスペックとして段差は5mmまで走行可能です。5mm以上の段差は、駆動輪が浮いて空転し、自己推定位置が狂う原因になります。
- 傾斜: 傾斜は5度まで走行可能です。上り傾斜にさしかかる際に、安全センサが傾斜を障害物と認識して停止する恐れがあります。段差は5mm以下、傾斜は5度以下が望ましいです。
4. 配膳ロボットを実際に製造現場で使っている様子
実際の製造現場での配膳ロボットの使用例を紹介します。以下のポイントに注意しながら使用されています。動画でもご確認ください!
- 環境適応: 直射日光やガラスの反射がないか確認。
- 床面の整備: 床が乾燥し、滑りやすい物質がない状態を維持。
- 段差と傾斜の管理: 事前に走行テストを実施し、段差や傾斜を確認。
5. まとめ
配膳ロボットの製造現場への導入には、以下の項目の確認が必要です。
- 使用場所: 直射日光の有無や障害物の有無、ガラス張りではないこと。
- 床面の状態: 水が溜まっていないこと、切削油などで滑りやすくないこと。
- 段差や傾斜: 段差は5mm以下、傾斜は5度以下。
当社では配膳ロボットの無償トライアルを実施しております。導入を検討しているが、環境が適しているか不安な方は、ぜひ当社にご相談ください。
OTHER COLUMN
その他の技術情報・コラム

「CARTI100」Q&A
Q. 電源が入りません充電はされてますでしょうか。充電をして電源ボタンを長押ししてください。症状が改善しない場合はご連絡ください。 Q. ロボットが動きません非常停止ボタンを確認してください。ロボットのモニター上部と背面 […]
ヒューマノイドの仕組みとは?人のように動くロボットの構造を詳しく解説します!
人のように歩き、話し、作業をこなす「ヒューマノイド」 ニュースや動画で見かけたことはあっても、「どういう仕組みで動いているの?」「普通のロボットと何が違うの?」と疑問に思う方も多いのではないでしょうか。本記事では、ロボッ […]

搬送工程自動化の新定番!配膳ロボットとは
目次1 1. 配膳ロボットの概要と従来の活用2 2. 工場における配膳ロボットの活用の可能性3 3. 配膳ロボット導入の手順4 4. 配膳ロボットの今後 1. 配膳ロボットの概要と従来の活用 配膳ロボットは、飲食店やホテ […]