
配膳ロボットをFAで使う場合の注意点③ ~導入編~
配膳ロボットを導入することで、人手不足の解消や業務効率の改善に期待できます。しかし、配膳ロボットは購入して終わりではありません。当社は「売って終わり」ではなく、「ご注文から長いお付き合いが始まる」と考えています。この記事では、配膳ロボットを導入する際の注意点を解説します。
導入のポイント
現場の環境変化対策
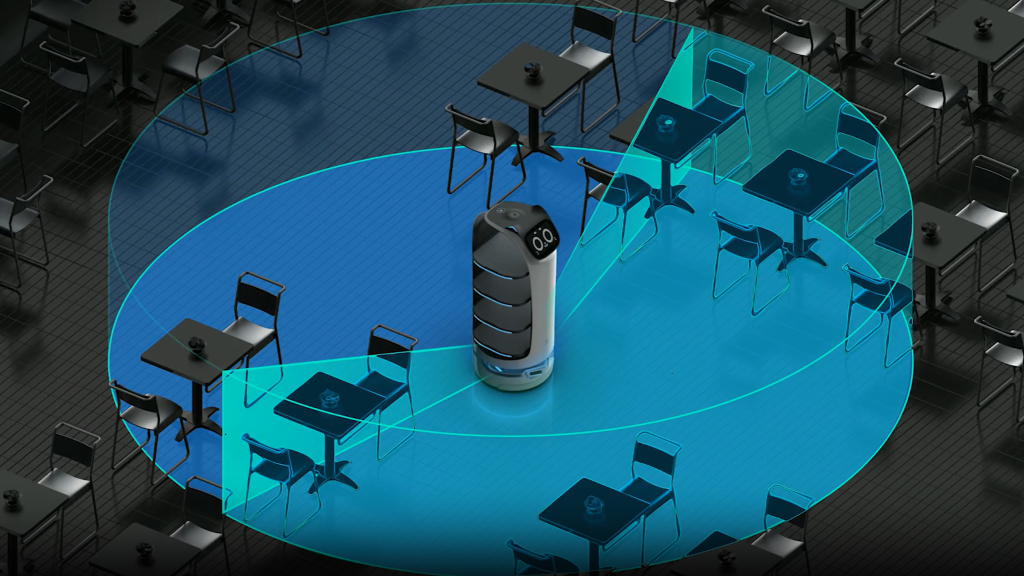
配膳ロボット(AMR)は高度なセンサーやカメラが搭載されており、障害物を避けたり、指定された経路を正確に進んだりすることが可能です。
しかし、マッピング時の環境に一定以上の変化が起こると、マッピングした環境と実際の現場が一致しなくなり、マップの認識ができなくなるため走行できなくなる可能性があります。
現場では、製品やパレット、台車、フォークリフトなど、さまざまな物が移動します。配膳ロボット(AMR)は、このような環境の変化に対応することが難しい場合があります。

ロボットの苦手箇所の洗い出しと対策
配膳ロボット(AMR)は、カメラを使用して障害物を検出し、マップの補正を行っています。そのため、強い光が差し込む場所や、ガラスのように透過性のある素材でできている壁などを認識しにくく、走行に支障が出る可能性があります。
当社はそれらのロボットが苦手とする場所を今までの経験から洗い出し、培ったノウハウを活かして、環境変化対策を提案・実施させていただきます。


導入時に必要なもの
配膳ロボット(AMR)の導入時に必要なものは、マッピングしたマップデータを編集するために使用するパソコンと、パソコンとロボットを繋ぐために使用するWi-Fiです。
当社が取り扱うPUDU社の配膳ロボットは、PUDU専用のマッピングソフトをパソコンにダウンロードして使用しますが、ロボットの専門知識がなくても問題なく設定して使用する事ができます。
当社では、お客様自身でロボットのマッピング等を設定できるように、納品時にロボットの設定方法や動作方法、マッピング方法などのプログラミングセミナーを無償で提供しています。
プログラミングセミナーを受講していただくことで、お客様自身でロボットの設定ができるようになり、マップの変更などが必要になったとしても、お客様自身で設定していただくことで、有償での変更依頼が不要になり導入後のランニングコストを低減する事ができます。
数回お客様自身で練習していただければ誰でも設定できるようになります。また、納品後にお困りごとが発生した際は、リモートでの設定サポートも対応しています。
当社がこれまでに実施してきた多数の配膳ロボット導入の経験をもとに、今まで培ってきたノウハウを存分に発揮させ、お客様の現場での導入をサポートさせていただきます。
まとめ
現在の製造現場にロボットを導入する場合、「人との共存」という考えが必要です。
ロボットは決して万能ではありません。ロボットが効率的に作業できる、ロボットに優しい環境を整えていただくことで、その機能を存分に発揮し、お客様の現場で活躍するでしょう。
OTHER COLUMN
その他の技術情報・コラム

カチャカのソフトウェアアップデート情報解説(Ver 3.11.11)
2025年5月28日にカチャカのソフトウェアアップデートが実施されました。このアップデートで2つの機能追加と複数の機能改善が行われたので、何が変わったのかを詳しく解説します! >>カチャカについて詳しくはこちら 目次1 […]

カチャカを導入することで何が出来る?業務へのカチャカ導入のススメ
カチャカとは、株式会社Preferred Roboticsにて製造されている小型の自律走行ロボットです。カチャカファニチャーと呼ばれる専用の棚とドッキングし、必要なものを必要な場所に運ぶことができます。この記事では、カチ […]
ウエハ搬送・配膳の自動化で生産効率を劇的改善!AGVとAMRの導入ポイントを徹底解説
半導体製造工場では、ウエハの搬送や配膳の自動化が生産効率を大きく左右します。特に、精密な操作が求められるウエハの取り扱いでは、人手に頼ると誤差や破損のリスクが高まります。そこで注目されるのが、AGVやAMRといった自動搬 […]