
SYNCRob:複数のロボットの協調を可能にする統合制御システムの設計思想

目次
■ SYNCRobの概要
現在、製造現場や工場ではAMRや協働ロボット、エレベータや周辺装置を「一連のタスク」として連携させたいというニーズが増えてきています。
しかし、異なる製品であったり異なる制御方式をもつデバイスを「連携」させることは現状とても難しいです。
そこで私たちは、「複数ロボットや装置を、相互の関連性をもって“協調”させるための統合制御システム」として「SYNCRob」を開発しています。
■ SYNCRobの登場背景
現状では、次のような問題をよく耳にします。
- 連携処理を実現するためには、各ロボットの状態を監視し、それぞれ個別の動作指示を出す必要がある
- この「システム全体の一括管理」が存在しないために、わずかな動作変更でも多大な手入れが必要
SYNCRobはこれらの問題を解決するため、各デバイスに「どのタイミングで、どんな動作をするか」を一元的に管理する、本当の意味での「統合」を実現します。
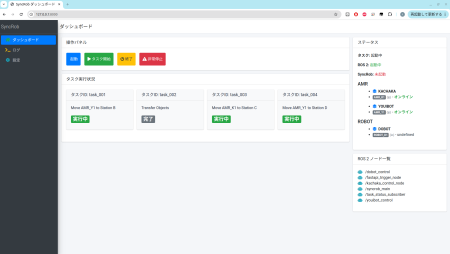
■ SYNCRobの構成
SYNCRobは大きく分けて以下のもので構成されています。
- タスク定義ファイル(YAML形式)
- SYNCRob メインノード(統括制御部分)
- 各デバイス制御ノード(AMR, 協働ロボット等に対応)
各デバイスの動作は「タスク」として一括され、前後関係や完了条件などによって動作順序が自動でコントロールされます。
■ SYNCRobの特徴
- 変更に強い構成。
- 条件分岐とフローに基づいて動作を作成できる。
- 現場での利用を意識した、簡易で安定した構成。
■ デモの一例(MEX金沢)
たとえば、下記のような流れを自動化する使い方が可能です。
- YOUIBOT P200(AMR)がワークを搬送
- YOUIBOT P200の到着確認後、Dobot CR10(協働ロボット)がYOUIBOT P200からワークを取出し、Kachaka Pro(AMR)へワークを移載
- Dobot CR10の移載完了確認後、Kachaka Proが次の目的地へ移動
- Kachaka Proの搬送確認後、YOUIBOT P200が待機位置へ帰還
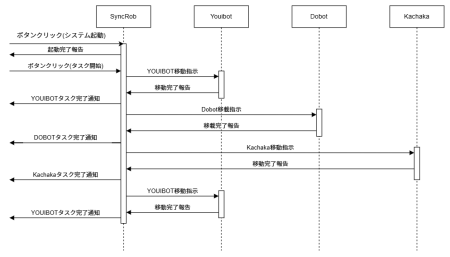
各動作はタスクとして統一管理され、特定の条件を満たしたときのみ次に進めるように調整されています。
MEX金沢2025出展映像「SYNCRob」
OTHER COLUMN
その他の技術情報・コラム

ROSとは?初心者でもわかるRobot Operating System入門
近年、ロボット開発は製造業やサービス業を中心に急速に広がっています。その中でも特に欠かせないのが「ROS(Robot Operating System)」です。ROSは世界中の研究者やエンジニアに利用され、ロボット開発の […]

配膳ロボットの各メーカーとその特徴を徹底比較!主要メーカーが提供する配膳ロボットをご紹介
近年、飲食業界や製造現場において配膳ロボットの需要が高まっており、さまざまなメーカーが革新的な製品を提供しています。この記事では、主要メーカーが提供する配膳ロボットの特徴、サイズ、使い勝手を比較しながら紹介します。 >> […]

配膳ロボットのメリットを徹底解説!コストと効率性の観点から
配膳ロボットは、飲食店での業務効率化やコスト削減を実現するツールとして注目されています。この記事では、配膳ロボットの導入により得られるメリットについて、導入コストや回収期間、AI技術・センサー技術の活用などを詳しく解説し […]