

PRODUCTS
取扱製品
OUTLINE
製品概要
人の手のように繊細な「つかみ」を実現!
FEATURES
特徴
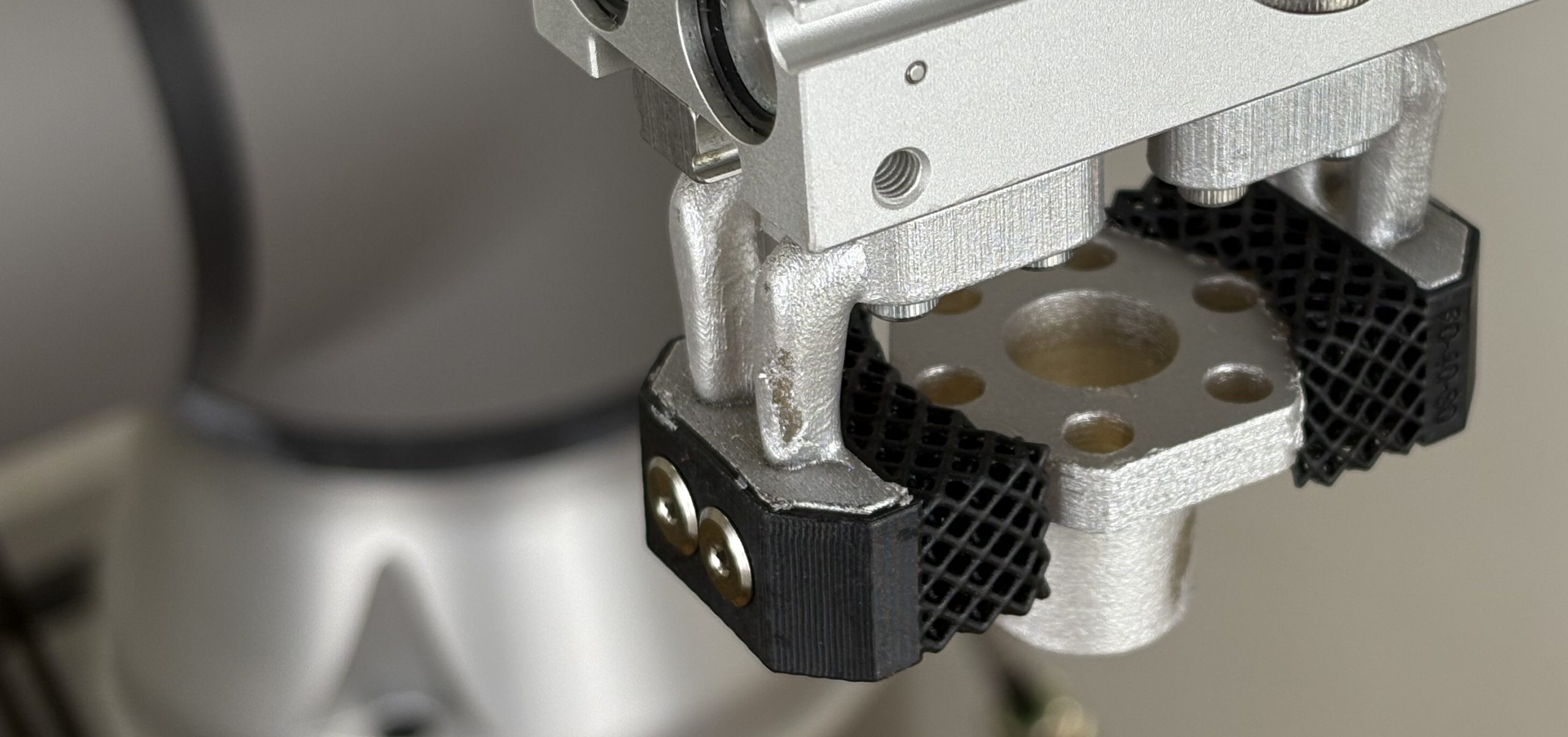
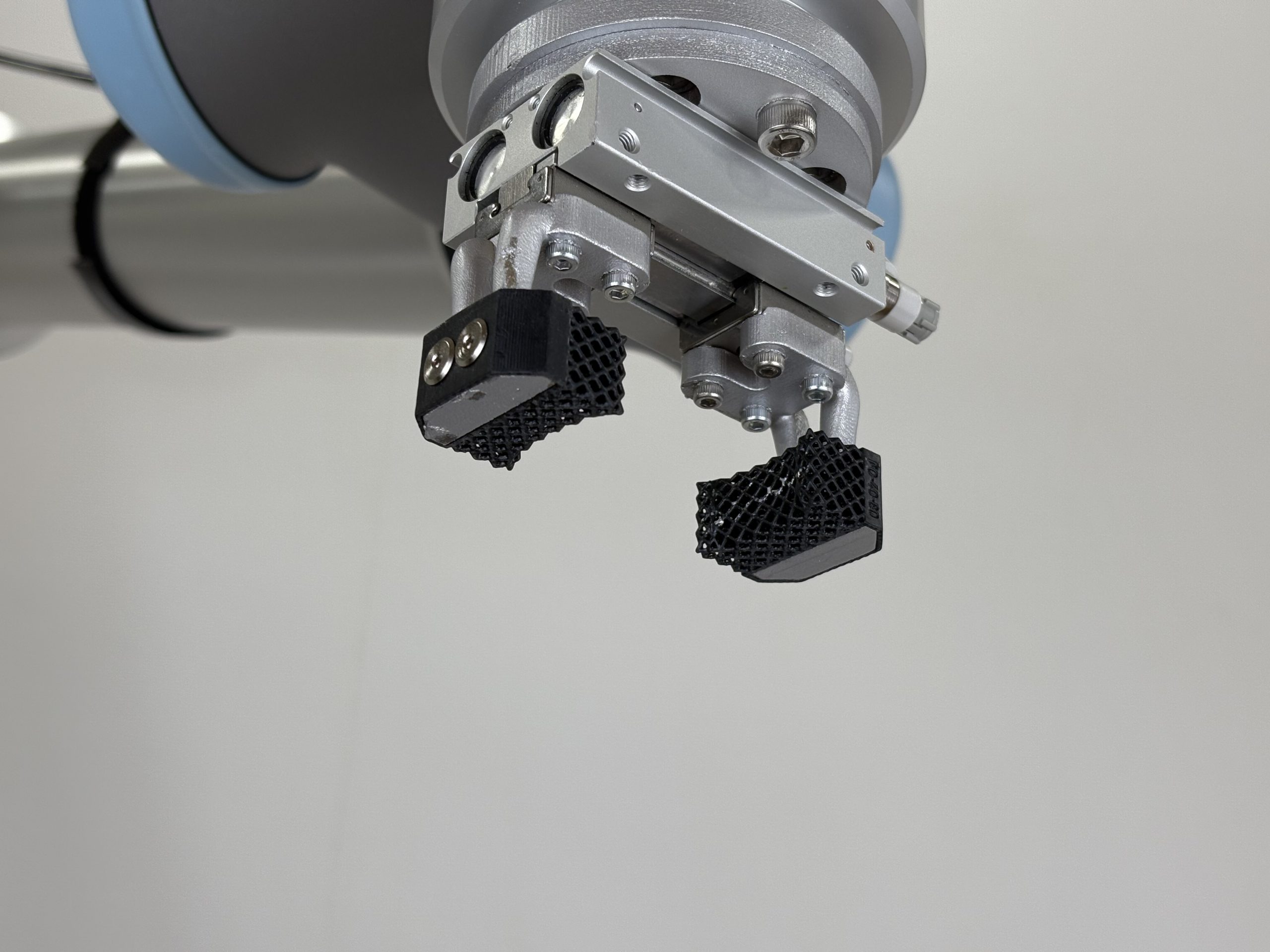
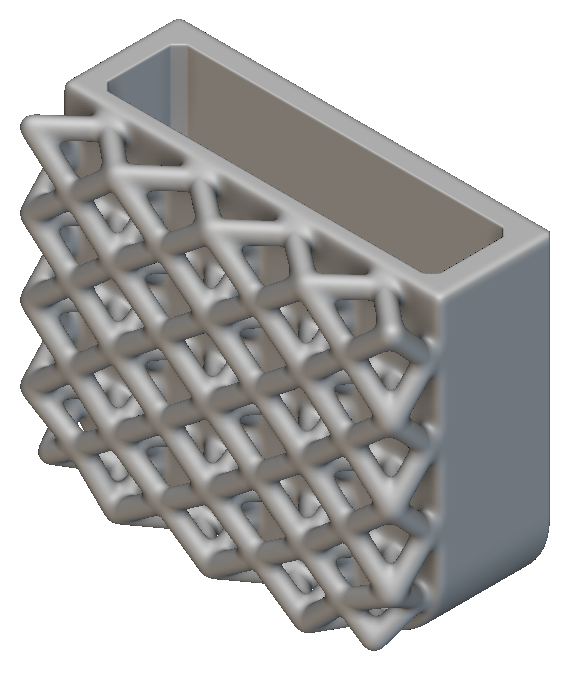
ラティス構造柔軟指は、3Dプリンターで作ったラティス構造(枝状に分かれた格子を周期的に並べて立体化したもの)の樹脂に柔軟性を持たせたロボットハンドツールです。指で優しく包み込むようにワークを安定して掴むことが可能で、面接触するため様々な形状を掴むことができ、「ツールチェンジ(段取り換え)」の工数削減を実現できます。
また、ワークの形状に倣って包み込むように把持するので、異形ワークや径違いのワークも一つのツメですべてつかむことが可能になり、チャックミスやハンドの段替え作業を大幅に減らすことができます。
ラティス構造柔軟指の特徴
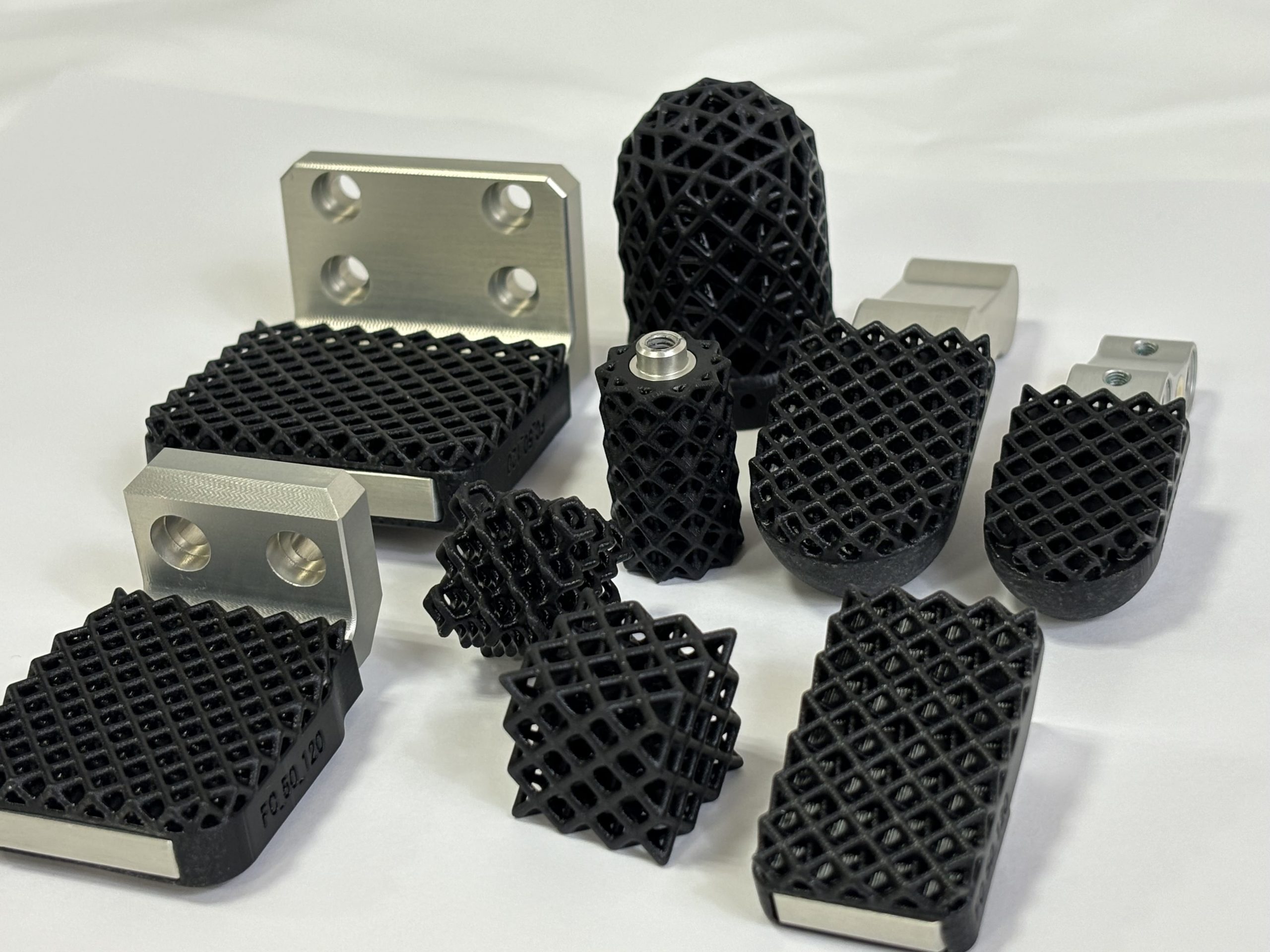
特殊ポリウレタン樹脂を使用
特殊ポリウレタン(high-performance-polyurethane-elastomer)樹脂を使用しており、ラティス(格子)構造に設計することによって構造的な柔らかさを持たせています。
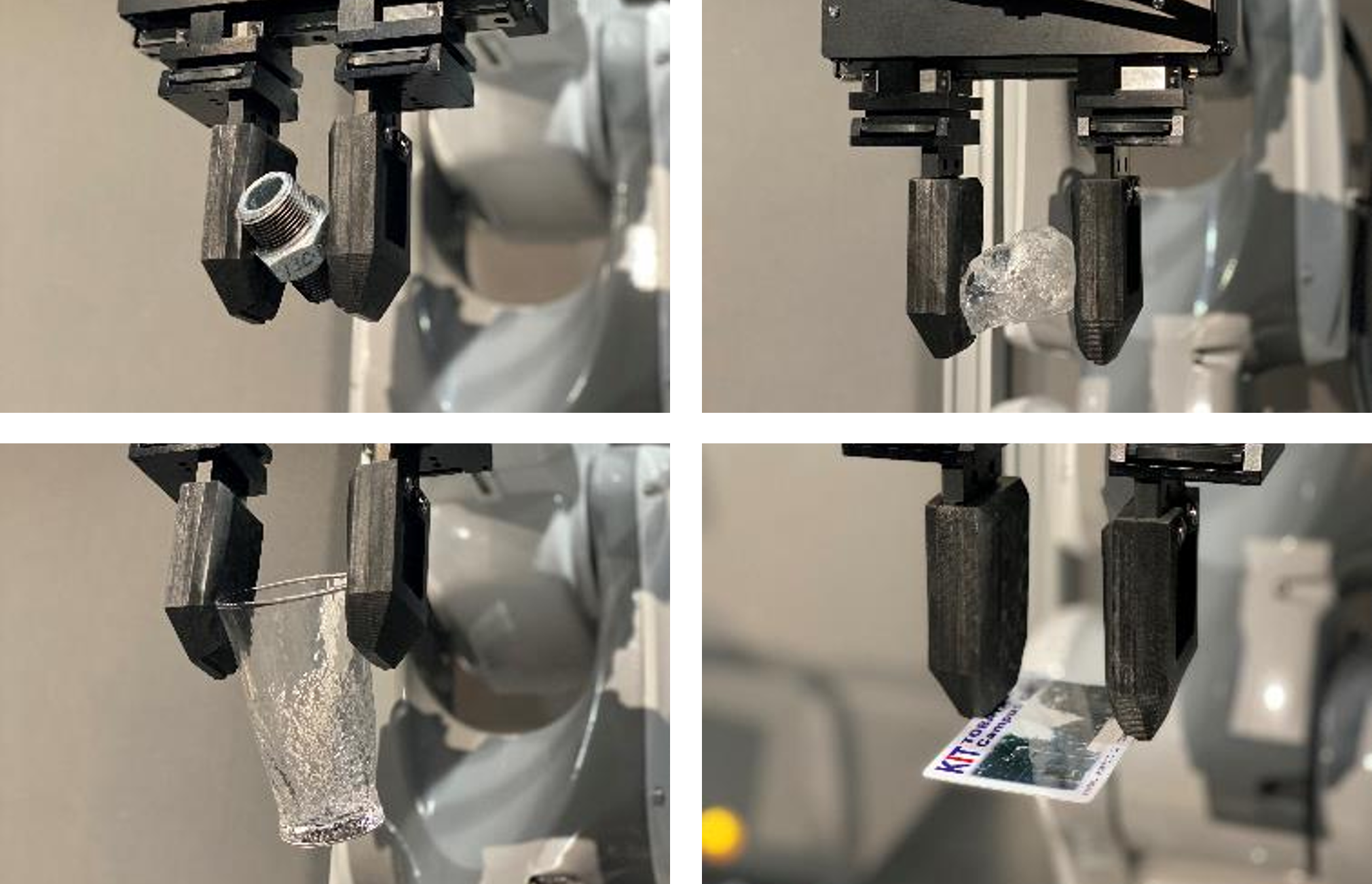
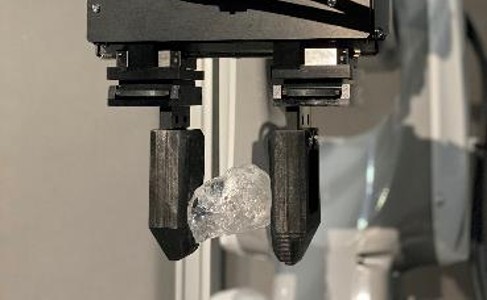
複雑な形状でも柔らかくつかむ
ラティス構造により、様々な形状をチャック可能です。複雑な形状を掴む時にもその形に変形、面接触して包み込むように持ち上げてくれます。
高い耐久性があり長持ち
ゲルやスポンジなどと比べラティス構造の柔軟指は強度のある材質を使い、構造によって変形を適切に調整して「やわらかさ」を実現しているので、高い耐久性能が期待できます。
設計自由度が高い
ラティス構造の柔軟指は3Dプリンターにて成形するため、設計自由度が高く様々な形状や種類が製造可能です。
多種多様なワークをつかめる


ラティス構造柔軟指 紹介動画
OTHER PRODUCTS
その他の取扱製品
ガッチャンコ
当社は2018年から協働ロボットの販売やシステムインテグレーションと向き合ってきました。 協働ロボットは、固定された場所で使用されることが少なく、むしろフレキシブルに移動して必要な時に使用したいというニーズが多くありまし […]

VG10
VG10はコンプレッサーや空気の供給を必要としないため、コンパクトで動きやすく、生産ラインに柔軟性をもたらし、メンテナンスコストを節約します。柔軟なアームと調整可能な真空を備えているため、VG10はさまざまなサイズのさま […]

MT1
PUDU MT1は、大型施設向けに開発されたAIスマート掃除ロボットで、業界トップレベルのマルチセンサ融合AIビジョン認識システムを搭載しているため様々な環境でも掃き掃除を行えます。また、24時間自動清掃が可能なので、よ […]