
ガッチャンコを工場に提案した事例をご紹介
ガッチャンコとは
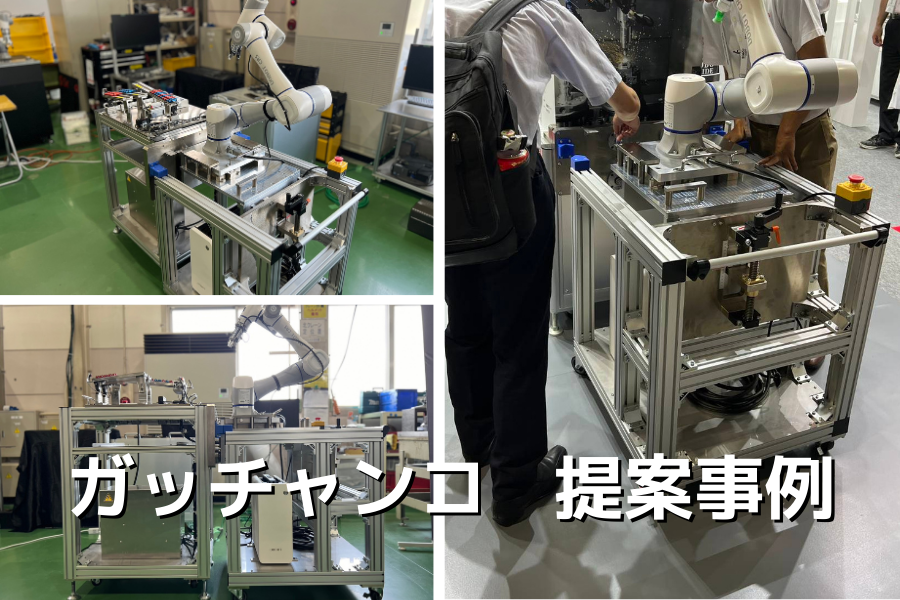
ガッチャンコは協働ロボットを積載した台⾞を⽣産設備や⼯作機械等に短時間で接続できる装置です。
⾼精度の位置だしが可能で、接続時に設備側から電気、エア、電気信号を台⾞側の協働ロボットに供給できます。そのため、移動先で協働ロボットを⾼精度にすぐ使用できます。
部品工場でのガッチャンコ
提案までの流れ
お客様の課題
- 作業場所は一か所でなく複数の場所で作業させたい
- 手動と自動の使い分けもしたい
対象の作業はフィーダーで整列された、サイズ:50mm×30mm、重量:300gの部品をピッキングする行程となっていました。投入箇所への必要な位置決め精度±2mmの総型形状への投入でリーチ:550mmあれば十分であることから、当社はまずDOBOT社製協働ロボット「CR5」を提案しました。
ワーク情報
- サイズ:50mm×30mm
- 重量:300g
- 必要な位置決め精度±2mm
- 必要リーチ:550mm
>>DOBOT社製協働ロボット「CRシリーズ」についてはこちら
しかし、「作業場所は一か所でなく複数の場所で作業させたい」や「手動と自動の使い分けもしたい」との要望もいただき、当社はガッチャンコも合わせて提案しました。
ガッチャンコを使用することで、ロボットと搬送台車が一体となり、手軽に移動することができます。そのため複数の設備で使用したい場合でも対応することが可能です。
また、ロボットが必要ない時間はすぐに取り外して移動させることができるので、手動と自動の使い分けも簡単に出来るようになります。
ガラス工場でのガッチャンコ
提案までの流れ
お客様の課題
- 作業を人から協働ロボットに変更したい
- ロボットでトラブルが発生した時は作業が中断してしまう
- 作業内容の変更に伴った、作業場所の移動
お客様の工場では、今までガラスの脱脂と接着剤塗布を手作業でしていました。しかし、その作業を人から協働ロボットに変更するという話が社内で上がりましたが、ロボットでトラブルが発生した時は作業が中断してしまうことが問題になりました。
また、将来的に作業内容の変更に伴った、作業場所の移動も視野に入っていたため、協働ロボットの移動に伴う位置出し作業の発生などの問題もありました。
そこで、当社はロボットと搬送台車が一体となっているため手軽に移動することができ、位置出し作業を短縮できるガッチャンコを提案しました。
ガッチャンコを使用することで、トラブルが発生してもすぐに協働ロボットを移動させることができ、人とロボットが簡単に入れ替わることができます。
また、作業場所が変更になっても搬送台車と協働ロボットが一体となっているため、簡単に移動でき、移動先でも位置出しの時間を短縮することが可能です。
動画で見るガッチャンコ
OTHER CUSTOMER REVIEWS
その他の導入提案事例
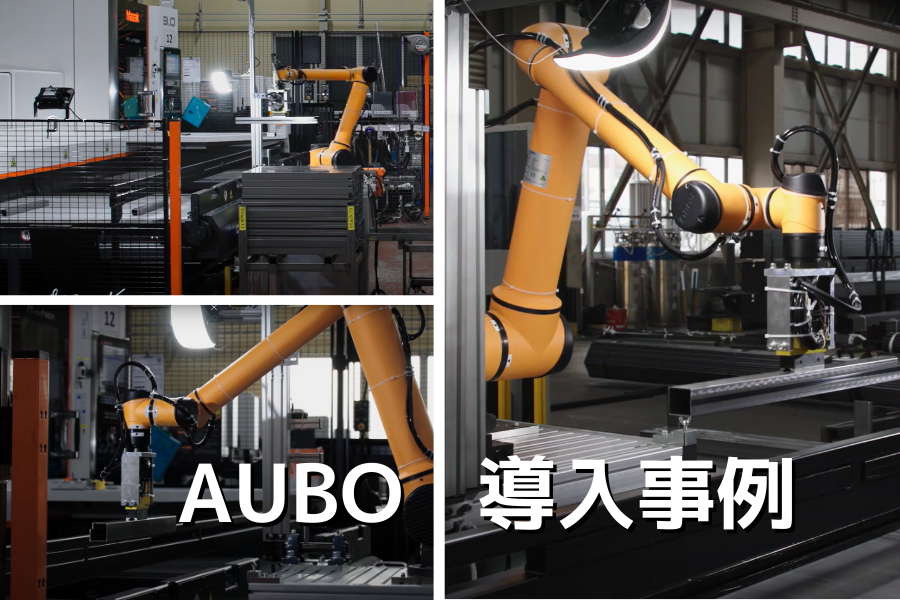
鋼管切断・パレタイジングの自動化
協働ロボット「AUBO」の導入事例をご紹介 本事例は、金属管の加工や製造を行っているお客様の事例です。このような業界は対象ワークが重く作業者に負荷がかかるなど労働環境に課題を抱えているお客様が多い業界です。 お客様につい […]
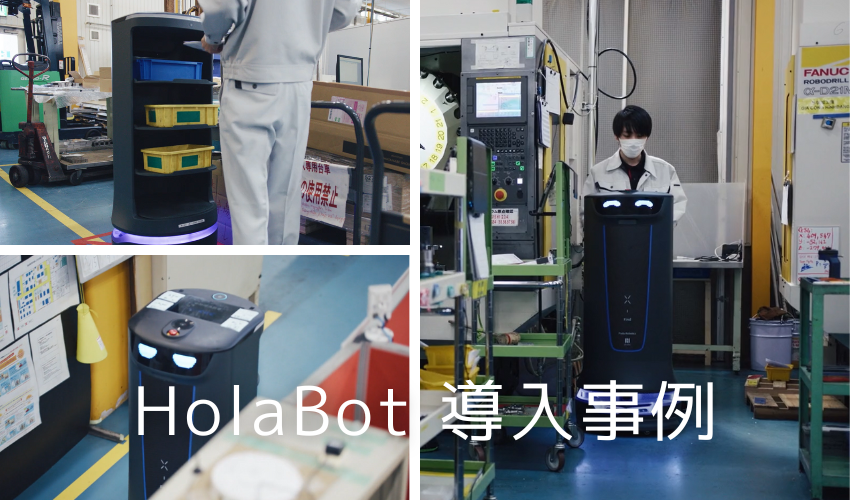
PUDU社製「HolaBot」で通い箱搬送の自動化
お客様について 「大野精工はサービス業」「ものづくりは人づくり」という言葉をコンセプトに、全社員、協力メーカー様と共に単品部品加工メーカーとして歩んで参りました。 大野精工様https://www.ohnoseiko.c […]
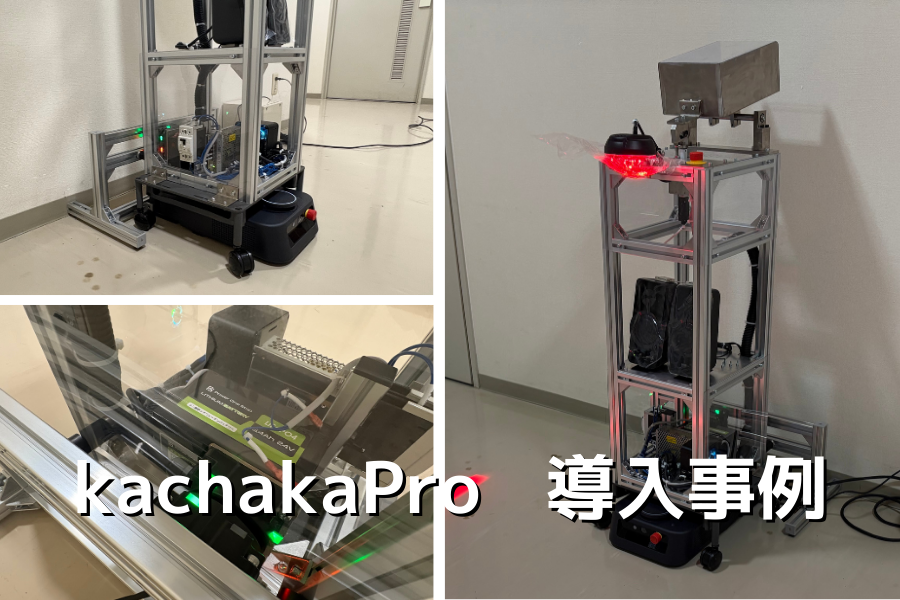
搬送ロボット”kachaka Pro”のカスタマイズで部品の自動移載を実現!
お客様の課題に対して、搬送ロボット”kachaka Pro”に最低限のカスタマイズを加えることにより、低コストで小物部品の自動移載を実現しました。 お客様の課題・ご要望 kachakaProを導入 […]